月面着陸 Behind the scenes: SLIMが新たな歴史を刻んだ夜、その舞台裏では
文:エリザベス・タスカー
(太陽系科学研究系 准教授)
2024年1月20日午前3時、JAXA相模原キャンパスにある宇宙科学探査交流棟には大勢の人が集まっていました。その夜月面に着陸した小型月着陸実証機「SLIM」について、報道やメディア関係者からの質問を受け付けていました。
記者の一人が手を挙げマイクが渡されると、JAXAの登壇者たちの顔を一通り眺めました。「着陸は成功しました…」と彼は話し始めました。「もうちょっと喜んでも良いと思うんですが?」
その瞬間、相模原キャンパスの反対側、管制室の外の廊下に笑い声が響き渡りました。「小型月着陸実証機SLIM ピンポイント月着陸ライブ」の配信を終えた研究者らが記者会見の配信画面を映し出すノートパソコンの周りを囲んでいました。誰もが疲れを感じ始めていましたが、皆の顔に笑顔が戻りました。
1月19日 午後11時 シチュエーション:ノミナル
「みなさんこんばんは。この番組は、小型月着陸実証機SLIMの月着陸運用、および、記者会見のライブ配信となります。」
SLIMのポスターの前に置かれたオレンジ色のソファに腰かけた鳥海 森(とりうみ しん)准教授は、YouTubeライブ配信の視聴者へ向かって話し始めました。このとき私はすぐ隣の部屋で、英語版のミラーチャンネル用のマイクに向かってこう話しました。
“Good evening, everyone! This is the live broadcast for the lunar landing operations for the Smart Lander for Investigating Moon (SLIM) and the press conference.”

前年9月に打ち上げられた小型月着陸実証機SLIMは、遠回りのようでいて実は燃料効率の良い軌道を経て月の周回軌道に入りました。SLIMはその軌道から月表面への最終降下を行う運用に備えているところでした。
遅い時間にもかかわらず宇宙科学研究所が活気に満ちていたのは、SLIMのみならず、あらゆるミッションの研究者らがライブ配信に協力していたためでした。鳥海准教授の座るソファに太陽と水星をモチーフにしたクッションが置いてあるのに私はひそかに気が付いていました。鳥海(高感度太陽紫外線分光観測衛星 SOLAR-Cのメンバー)と、ライブ配信の調整役であった村上 豪(むらかみ ごう)助教(国際水星探査計画BepiColombo/水星磁気圏探査機「みお」のメンバー)が、緊迫した状況になった時に抱きしめて落ち着きを取り戻すことができるよう、お気に入りの天体を手元に置いておきたいということかな、などと考えていました。
ライブ配信の最初の1時間ほどは、鳥海がSLIMに携わる科学者やエンジニアから話を聞くことになっていました。私は英語で同様の情報提供をすることになっており、同時通訳するというわけではないので事前に打ち合わせた通りの話にとどまってくれることを切に願っていました。
SLIMの最終降下運用が始まる深夜には探査機から直接届くデータをライブ配信画面に映し出すことになっていて、その20分後には月面着陸が完了する予定でした。
小型月着陸実証機(SLIM)ミッション概要動画
「着陸のトライはやり直しのきかない一発勝負となります。」SLIMの櫛木賢一(くしき けんいち)サブプロジェクトマネージャは以前このように話していました。
月の重力は地球の重力の6分の1に過ぎませんが、それでも一度始まった降下を止めることは出来ないほどの力があります。いったん着陸降下シーケンスが始まるとその後何が起きてもSLIMが何らかの形で月面に到達することを意味していました。
私と鳥海のいた場所から廊下を進んだところに管制室がありました。1時間ほど前にSLIMチームは第二回目の「近月点降下マヌーバ」(SLIMの月面高度を15kmまで縮めるための着陸前のシーケンス)を実行するかどうかを決定していました。決定は「GO」でした。
英語版の配信ライブのナレーションを行っていた部屋では、JAXAの開発中ミッション「LiteBIRD(ライトバード)」からフレドリック・マツダ特任助教が私の左側、そしてJAXA宇宙教育センターの北川 智子(きたがわ ともこ)センター長(当時)が右側に座りました。私のマイクの音量を確認しながら日本語と英語の配信を見比べ、二人とも私を励ますように頷いてくれていました。
シチュエーション:ノミナル
1月19日 午後11時40分:降下まであと20分
「宇宙ミッションというのは、どれだけ事前の準備をしっかりしても実際にやってみないとわからないことが多いため、とても緊張します。」SLIMプロジェクトの森 治(もり おさむ)教授はのちにこう振り返ります。
月面着陸の成功率は、2000年以降であってもおよそ半分にとどまっています。SLIM以前の直近の例で言えば、インドが月着陸機「Vikram(ヴィクラム)」 の月面着陸に成功しましたがロシアは成功していません。
「どうなるかわからないからこそ、多くの方に興味を持っていただき、一緒にヒリヒリしながらSLIM運用を見守っていただけたのだと思います」森はこのように話します。
SLIMは日本初の月面軟着陸を目指していましたが、もっと重要なことは、これまでにない精度で機体を狙った場所に着陸させるということでした。従来の月面着陸の精度は数kmから10数kmでしたが、SLIMは目標地点から100m以内の範囲に着陸することを目指していました。しかも着陸目標地点はSholi (しおり) と名付けられたクレータ近くの傾斜地。そういった場所でもバランスを失って倒れてしまうことのないよう、まず後脚一本で着地してから機体を前傾させ斜面に抱き着くようにして安定させる、二段階着陸が計画されました。

ライブ配信で鳥海准教授と一緒になった森教授は、透明の容器に入れた月面を模した砂の上でSLIMの小型模型を使って二段階着陸の様子をデモンストレーションすることにしました。そしてこの夜最初の着陸は、あるフラグ(この後の展開の予兆となるような出来事)として示唆的となったのです。
のちに森は「二段階着陸を実演するコツは、SLIM模型に適度な水平速度を与えることです」と説明します。「水平速度が遅すぎると模型の脚が砂に突き刺さってそのままとなってしまい、二段階着陸は失敗してしまいます。逆に速すぎるとあっという間に終わってしまい、視聴者の方に二段階着陸の様子があまり伝わりません。」
森は9月の打ち上げライブ中継の際にも同じようなデモンストレーションを行っていました。その時は水平速度を大きくしすぎてしまい、二段階着陸が一瞬で終わってしまったと言います。そのため今回は水平速度を思い切って小さくしたそうですが・・結果、SLIM模型は砂の上に突き刺さってしまいました。
「慌ててやり直したらうまくいったのですが、」森はこのように続けます。「少し微妙な雰囲気になってしまいました。」
シチュエーション:ノミナル
1月20日 0時00分:降下
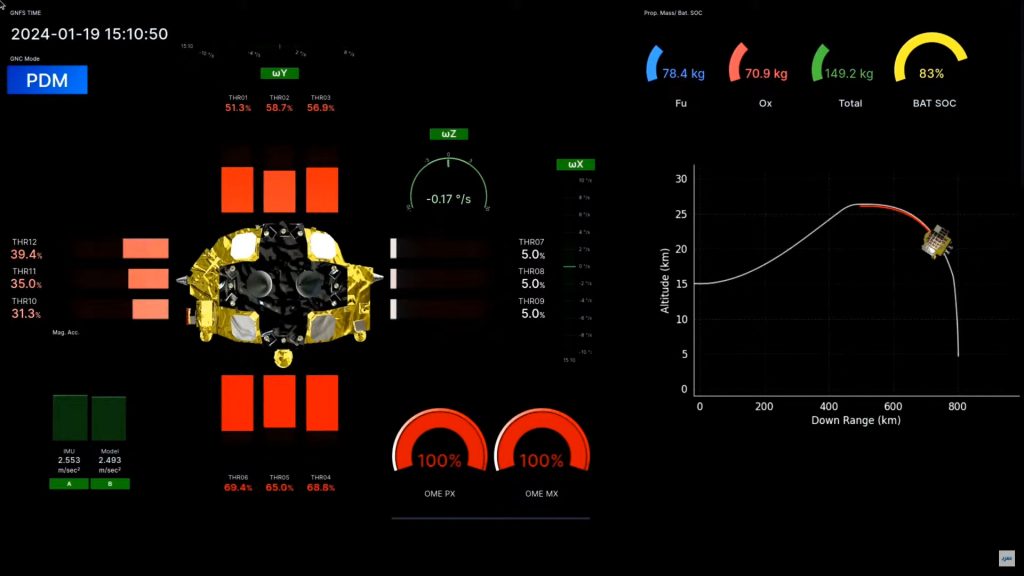
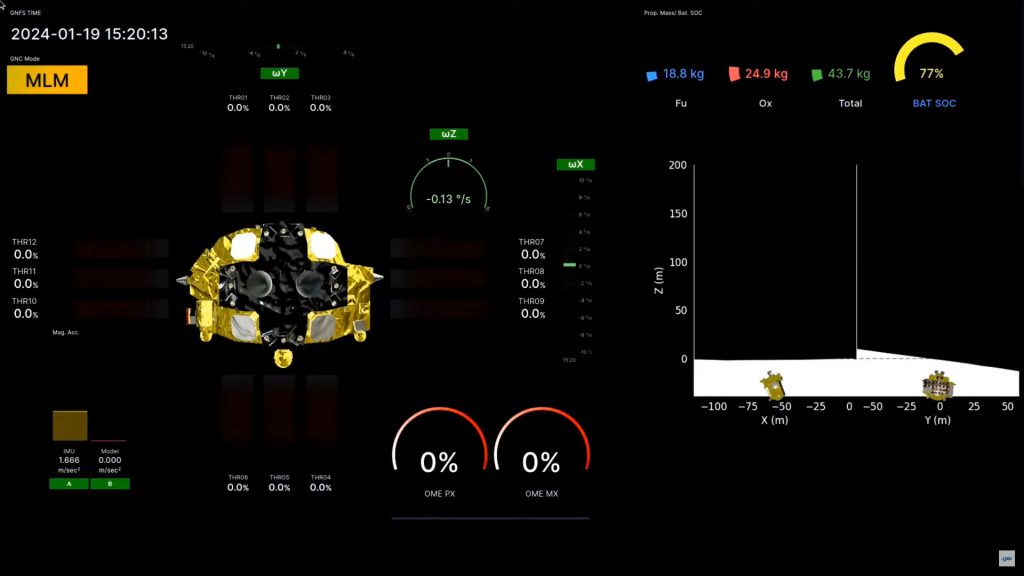
ライブ配信の画面が切り替わると、SLIMから送信されてくるデータがリアルタイムで表示されるようになりました。「G-Plot(ジー プロット)」と呼ばれるこの画面にはセクションごとに、加速度、角速度、推進剤の残量、バッテリー容量、SLIMの計画軌道と実際の軌道を比較した情報などが表示されています。管制室でもこれと全く同じ画面が表示されていました。
藤本 正樹(ふじもと まさき)宇宙科学研究所副所長は、「配信は可能な限りリアルであることを追求しました。つまり管制室にいる人が見ているのと全く同じ画面を皆さんにお見せすることです。」と説明します。
管制室ではSLIMの構造系担当、河野 太郎(かわの たろう)が、ボタンが4つしかない珍しいキーボードを前に早押しに備えていました。SLIMは「画像照合航法」と呼ばれる技術を用いてピンポイント着陸を目指していました。まず、SLIMは月面上を航行する間に眼下に広がるクレータ状の地形を撮像します。その画像をもとに、SLIMに搭載されたソフトウェアがクレータを特定します。そして、月面マップのクレータパターンと一致する場所を特定します。こうしてSLIMは自分のいる正確な位置を迅速に判断し、自律的に軌道を修正、それまでにない精度で目標地点に到達することを可能にするのです。このような方法が採用されたのは初めてのことで、河野の仕事は、万が一SLIMが間違った判断をした際に介入する「画像照合航法支援」でした。
画像照合航法が始まると、SLIMは地上に2枚の画像を送ってきます。1枚目はSLIM搭載のカメラで撮影した現在のSLIMの下方の月面画像。2枚目は搭載されたアルゴリズムを用いて推定した現在位置の座標と搭載月面マップを用いて再現した月面のコンピュータ生成画像(CG)です。順調に進めばこの2つの画像は一致するはずです。
2枚の画像のほか、SLIMに搭載されているものよりもはるかに高性能な地上のコンピュータ上でSLIMに搭載されたコンピュータとは異なる2つのアルゴリズムを動作させ、月面の画像から推定された座標に基づいて2枚のCG画像を生成します。

河野は4つのキーの1番目を押します。ディスプレイがSLIM搭載カメラにより月面画像から地上のコンピュータで生成されたCG画像のひとつへと切り替わります。2枚が一致すれば河野は「OK」ボタンを押し、一番右の「送信」ボタンを押すことで結果を報告します。2枚が一致しない場合には3番目の「NG」(No good)に続いて「送信」を素早く押します。
「SLIMが自分の判断結果に従って軌道修正を始めてしまっていると訂正が間に合いませんので、一連の作業は非常に素早く行う必要がありました。」河野はこう説明します。
管制室では河野の近くにさらに2人のSLIMチームメンバーが座り、同じ手順で、月面の画像と”搭載コンピュータが生成したCG画像” または “地上のアルゴリズムから生成したもうひとつのCG画像” のいずれかに切り替えて、作業を行っていました。
この運用中、SLIMは全くためらうことなく判断作業を繰り返しました。計14回の自律判断を行い、全てSLIM自身が正しく軌道修正をしました。地上からSLIMへの修正コマンドが送られることはありませんでした。
SLIMが月面に向かって最終降下をはじめます。G-Plot上には予定された軌道と完璧に同じ、実際の探査機の軌道が表示されていました。「よしっ」という小さな声も聞こえた、とプロジェクトマネージャの坂井 真一郎(さかい しんいちろう)教授は振り返ります。
月面到達まで、あと50m強。
シチュエーション:ノミナル
1月20日 午前0時20分:着陸
森教授は成功を喜ぶ心づもりでいました。SLIM降下運用中、G-Plot上で刻々と変わるステータスを番組で説明しながら、SLIMが垂直姿勢に移行してホバリングし、避けるべき危険な障害物がない場所を検索すべく自律的に月面をスキャンし、その後降下を始めるのを見ていました。すべてがうまく進んでいるように見えました。
「G-Plotでモードが『MLM (Moon Landing Mode = 月面着陸モード』 に切り替わり、SLIMの姿勢が(二段階着陸で)横向きに表示されれば、ガッツポーズしようと考えていました。」森はこのように振り返ります。「成功はほぼ間違いなし、と考えていました。」
G-Plotの画面上に、「MLM」が表示されました。が、SLIMの姿勢は水平には表示されていません。森が模型でデモンストレーションしたときのように、SLIMの姿勢は垂直に見えていました。
英語チャンネルの配信スタジオにいた私はその時同じG-Plotの画面を見ていましたが、ただちに問題があることだとは思いませんでした。SLIMが月面に到達した直後なので姿勢が正しく反映されていないだけなのだ、と考えました。森も同じように考えたと言います。
「MLMになった直後は、着陸が成功した可能性は十分にあると考えていました。」森はこう話します。「というのも、姿勢の計算は複雑であり、一定の姿勢範囲を超えてしまうとうまく計算ができなくなる、ということはよくあることだからです。」
ですが、もし想定通りに事が進んだとしたら、近くにある管制室から運用チームの歓声や拍手が聞こえてくるはずでした。
・・待ってみましたが、シーンとしたままでした。
シチュエーション:不明
1月20日 午前0時20分:月面到達
管制室の真ん中に立っていた宮澤 優(みやざわ ゆう)は、ある二つのことに気が付きました。一つ目はSLIMの姿勢が想定の姿勢と異なっていること。二つ目は太陽電池が発電していないことでした。
宮澤の着陸運用当日の役割はSLIMスーパーバイザーと呼ばれるものでした。これは各サブシステム担当の報告をもとに探査機の情報を把握し、SLIMへ送る指令を指示する役割です。24時間体制で重要な運用を継続できるよう、チームメンバーはローテーションを組んでこの厳しい役割をこなしていました。
「着陸直前までは驚くほど完璧に進みました。」宮澤は振り返ります。「最後に予期せぬことが起きてはいたようですが、太陽電池が発電していない場合の手順は用意してありました。」
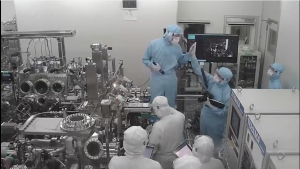
着陸降下中の管制室内の様子
発電を行えない場合、SLIMは搭載したバッテリーの電力のみに頼ることになります。つまり、稼働時間は2,3時間であるということを意味していました。この時点でまだ原因が分かっていなかったものの、次にやるべきことは明確に整理してありました。バッテリーが無くなって通信が途絶える前に、着陸運用に関する記録データをすべて地上にダウンロードすることです。
「着陸直前までSLIMが完璧な動作をしていたため、着陸時にバッテリー残量が十分残っていることを確認できていました。」宮澤はこう振り返ります。「必要なデータを下すのに十分な時間があることは直ぐに分かったため、少し動揺はしていましたがパニックにはならずに済みました。」
データのダウンロードができているということは別の重要な事実を示します。すなわち、SLIMは月面で稼働したということが確認されたということです。日本は、月面への軟着陸に成功したのです。
シチュエーション:オフ・ノミナル
1月20日 午前0時30分
SLIMチームが探査機の運用に取り組んでいる間、相模原キャンパスの別の部屋では緊急協議が行われていました。何が起きているのか正確に分からない中、記者会見をどのタイミングで始めるのが妥当でしょうか?
0時30分を目指してメディアの記者らが記者会見の会場に集まっていましたが、探査機からのデータを検証するため、開始が数時間ほど遅れる可能性が出ていました。
探査機の状態に関する情報が地上に届くにつれ、発電できていない原因はSLIMの太陽電池パネルが太陽の方向を向いていないことにあるのでは、とチームは考え始めました。探査機は想定になかった “メインエンジンが上を向いている状態” で着陸したようでした。ですが、なぜこんなことが起こったのか、そして、SLIMが確実にピンポイント着陸の精度を達成できたのかどうかについてはまだ分かりませんでした。
管制室の外の配信スタジオでは、鳥海准教授が視聴者の方々に向けて「現在SLIMの状況を確認中です」と繰り返すことしかできませんでした。
「あれを何度も何度も繰り返すのは、正直、辛かったです。」鳥海はこう明かします。「でも我々の使命は事実を伝えることであり、あの場で勝手に状況を推測することは出来ませんでした。」
管制室の中と同じように、想定外の事態が起きた場合(オフ・ノミナル)のライブ配信については事前に決まっていることがありました。午前0時30分、スタジオからの配信は止められました。のちほど記者会見を中継するので一旦中断します、しばらくお待ちください、と鳥海は最後のアナウンスを行いました。
「月面着陸からライブ配信の中断まで、ほんの10分程度だったのですがとても長く感じました。」村上助教はこう振り返ります。
緊急協議の現場では、記者会見を午前2時10分に開始することで話がまとまりました。
記者会見に登壇した藤本副所長はこのように振り返ります。「記者の方々をこれ以上待たせるわけにいかない、その一方でいったい何を話せばいいのだという、両者のギャップにはまったと言えるでしょう。さらに2時間待ってから会見を始めれば内容はベターだったかもしれませんが、そこまで待っていただくことは選択肢にはないとされました。ほんとにそうなんですかね、とは今でも思っていますが。」
1月20日 午前2時
管制室のSLIMチームは、予定になかったタスクに移行していました。SLIMは主にピンポイント着陸技術を実証するための工学ミッションでしたが、科学観測のための機器も搭載されています。マルチバンド分光カメラを用いて近くにある岩石からの様々な波長の反射光を観測すれば、その鉱物組成を調べることが可能です。
太陽電池が発電しない場合の手順として、バッテリーの電力が残っているうちに探査機運用のデータをダウンロードすることが第一優先、とされていました。そのため、マルチバンドカメラは使わないことになっていました。その通りに進めた結果、データはすべて地上に降りてきており、かつ、バッテリーにはまだ余裕がある状況となりました。
管制室からコマンドが送信されました。SLIMに搭載されたマルチバンドカメラが月面で目を覚まし、画像を撮影して地上へ送信し始めます。
SLIMプロジェクトサイエンティストの澤井秀次郎(さわい しゅうじろう)教授はこう話します。「マルチバンドカメラの正常動作が確認できたことでほっとしました。」
さらに、SLIMの着陸姿勢が想定外であったことに関しても希望の光が見えてきました。太陽電池が西を向いているということをかなりの確度で推測できました。つまり、この時点、月の夜明けの時点では太陽光は太陽電池にあたっていなくとも、夕暮れが近づく時期には状況が変わるはずでした。月面での昼間が終わるころ、すなわち1~2週間先にはSLIMの電力が回復する可能性が出ていました。
ただ、月の昼間をやり過ごすには危険もあります。月には機体温度を緩和する大気がほとんどないため月面上の正午頃には月面温度が120℃を超えることもあり、SLIMに搭載されている機器の動作上限温度を超える高温となってしまうことがあります。そうなると、SLIMは再び目覚める前に熱でやられてしまうかもしれないことを意味していました。
SLIMのバッテリー残量が12%になり、宮澤はバッテリー切り離しの指示を出しました。残量が少なくなりすぎると、SLIMがたとえ昼を生き延びたとしても復活できなくなる可能性があったことからの判断でした。これも事前に準備してあった手順でした。
この時マルチバンドカメラは視野の大部分を撮影していましたが、さまざまな波長で画像を捉えることができるフィルタホイールの動作については未実施でした。澤井教授はこのことに懸念を抱きながらも、ここでやめるのが正しい決断だと考えていました。
「マルチバンドカメラの理学チームから、フィルタホイールの動作については自信があるというコメントもありましたが、電源系担当者の顔色も考慮してその確認の実施を先に送りました。」澤井は振り返ります。
午前2時57分、SLIMは眠りにつきました。
1月25日~28日
森教授は家族にからかわれていました。
SLIMは着陸直前に、緊急事態であったにも関わらず、LEV-1(レブワン)とLEV-2(レブツー)という二つの小型プローブを分離していました。LEV-2(別名SORA-Q、ソラキュー)は小さな球体をしたローバで、球体で閉じた状態から車輪を開くとカメラが現れる仕組みです。LEV-2は月面を転がりながら進んでSLIMを撮影し、LEV-1のアンテナを介してデータを地球に送信しました。その写真が、あの時G-Plotに表示されていた姿勢が間違いなく正確であったことを証明しました。SLIMは月のレゴリス(岩石表面を覆う柔らかい堆積層)に頭を下に静止したのです。

変形型月面ロボット(LEV-2)「SORA-Q」が撮影・送信した月面画像 (クレジット:JAXA/タカラトミー/ソニーグループ(株)/同志社大学 )
「G-Plotが表示していた通りで、『G-Plot恐るべし』と思いました。」森教授はこう明かします。
LEV-2が撮影したような実際の機体の姿勢は、着陸運用の夜にダウンロードされたSLIMのデータをもとに想定はされていました。それでも、プロジェクトマネージャの坂井教授はこの画像を見たとき「腰を抜かしそうになった」と述べています。
坂井はこのように振り返ります。「あの姿勢を見たからではありません。これまで20年以上この分野で仕事をしてきて、自分たちが作ったものが実際に宇宙にある姿を見たのは初めてのことでしたので、その衝撃からでした。」
しかもSLIMの姿勢は、森が着陸ライブ配信中にSLIMの模型を砂に突き刺してしまった時のものと、逆向きではあるものの、同じ垂直で立っていたのです。
「刺さってる 見事にフラグ回収」家族が参加するメッセンジャーアプリで姉からこんなコメントが送られてきていた、と森は明かします。
弟からは「やるじゃん☆」と送られてきたと言います。
想定されていない姿勢を暗示するような伏線を自分が敷いてしまったかも、と初めは落胆していた森でしたが次第に考えが変わっていきました。SLIMでは従来型の太陽電池ではなく軽量な薄膜太陽電池シートを採用しています。そもそも電力不足の原因は太陽光の角度である可能性が最も高いと考えられていましたが、この新しい薄膜設計の欠陥という可能性も完全に排除することはできませんでした。もしSLIMが太陽電池のある面を月面側に向けて着陸していたら発電は不可能で、太陽電池シートの性能確認もできないままだったでしょう。ですが、SLIMは月面に垂直に立っていたことから、月の夕暮れの時間には太陽電池に太陽光が当たるはずでした。森は、この技術を証明するチャンスに期待していたのです。
「この薄膜太陽電池シートは今後の深宇宙探査に欠かせないものだと考えています」森はこのように話します。
太陽が月面を横切って西に傾くまでの間も、SLIMチームは探査機との通信を試み続けました。
そして着陸から8日後、ついにSLIMは呼びかけに応じました。
1月28日~31日:運用再開
マルチバンド分光カメラのチームは月の石に犬の名前をつけることに必死でした。猫も候補には挙がったそうですが、月面からの画像に写る岩石の大きさのバリエーションを見ると、さまざまな大きさの犬種にするのが良さそうでした。さらにSLIMのちょっと変わった着陸姿勢は、科学観測の観点からは結果的に大当たりであることが分かってきていました。
澤井教授は「現在のSLIMの設計では、今の姿勢が科学観測のためにはほぼベストの姿勢と思っています」と話します。
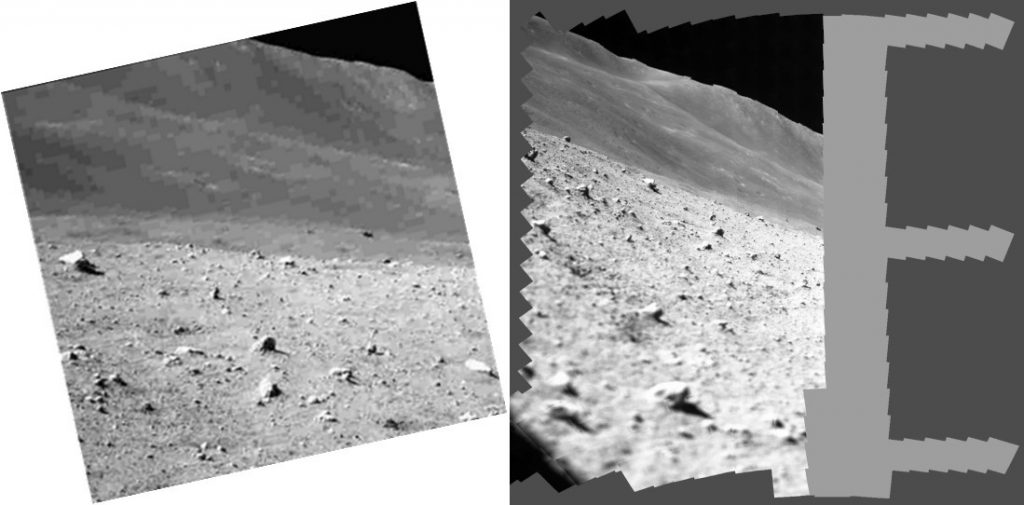
機体が垂直で逆向きになっていることの見映えはよくなかったかもしれませんが、結果としてマルチバンド分光カメラの視野が十分にとれ、観測したかった犬の群れを網羅することが出来ました。
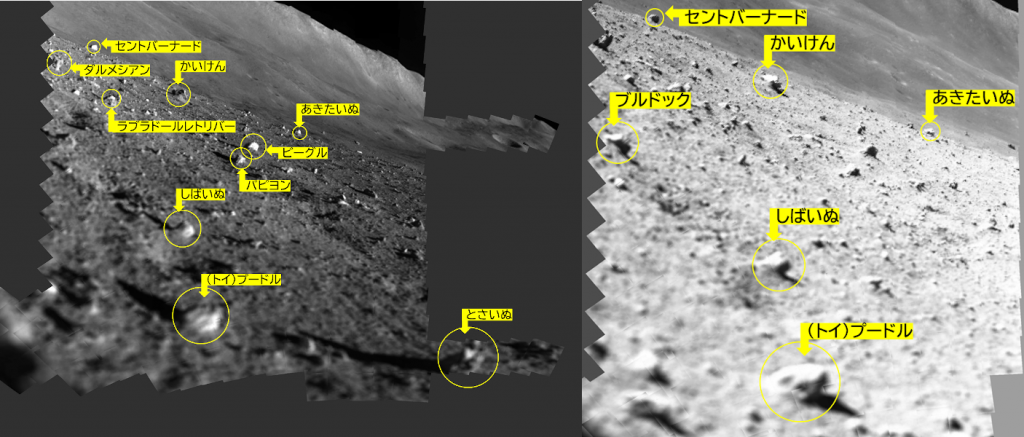
小型月着陸実証機SLIM搭載マルチバンド分光カメラ(MBC)による観測候補岩石名(クレジット:JAXA、立命館大学、会津大学)
もともと計画されていたSLIMの着陸姿勢では太陽電池が東を向いていて、温度が上昇して熱雑音が観測を劣化させる前、つまり月の夜明けの時間帯に観測機器を運用することが出来ます。そして月の空を太陽が昇るにつれ、SLIMはさまざまな照射条件のもとで月面を観測することが可能になるはずでした。
それと同じような好条件は日没の時間帯にもあり、太陽電池が西に向いている姿勢でそのような観測は可能となります。さらにSLIMが月の朝の時間帯に着陸してから月での日没まで数日あったので、その間に、着陸後最初に撮像した月面画像を踏まえて運用計画を具体的に計画する余裕を生み、結果として好都合でもありました。機体やカメラを損傷する可能性がある月の昼の高温環境を生き残ることができるのかというリスクはありましたが、結果として運はSLIMに味方し、科学チームは運用を再開することが出来ました。
最終降下運用中の高度50m以下で何が起きたのか、詳細は今も調査中です。SLIMからダウンロードしたデータから分かっていることは、機体にある二基のメインエンジンのうち一基を突然失ったことです。この時に機体直下の月面を撮像した画像からは、機体からノズルが落ちているようにも見えます。何が原因かはまだ分かっていませんが、このような大事故にもかかわらず、SLIMは残った一基のエンジンを使って軟着陸を成功させているのです。片方のエンジンだけしか使わなかったことにより推力のアンバランスから水平方向速度が生まれ、機体の姿勢が想定外のものとなったのでしょう。

データをみると、ピンポイント着陸が完全成功を収めたことも明らかになりました。SLIMは目標地点から55mの地点に着陸し、ミッションの目指していた精度100m以内に十分収まるものでした。さらに高度50m付近からの最終降下開始前の時点では、目標地点から3~10mであったと評価されています。この後に障害物を避けるため自律的に軌道修正する障害物回避マヌーバを行うことで、SLIMがコースから外れることはもともと予測されていました。障害物回避マヌーバに加え、一基のメインエンジンのみでのバランスを失ったことによるドリフトが、SLIMを東へ流しました。
「あの状況から着陸できたことを喜ぶべき、という気持ちです」坂井教授は話します。「特に着陸後の姿勢が分光カメラの観測等に大変都合の良い姿勢だったことについては、誰かに、何かに、感謝したいような気持ちです。」
メインエンジンの一つを失ったことで、SLIMは二段階着陸の実証が不可能になってしまいました。澤井教授は、若いメンバーに対して「完全な成功」という結果を残してあげられなかった点は今でも残念に思っている、と話します。ただ、今回のことで宇宙探査ミッションの重要な教訓を与えることが出来たかもしれないとも感じていると言います。
「『思いつく限りのことをやって、しつこく確認しても成功できるとは限らない』、なので、『絶対に手を抜いてはいけない』ということです。」
1月末になり、月面に夜が訪れるとSLIMは再び眠りにつきました。月の夜も月の昼と同様に極端な温度であり、-170℃を下回るためSLIMが生き延びるのは難しくなります。そもそも元からSLIMの ”越夜” は期待されていませんでした。ですが喜ぶべきことに、太陽が昇り天空を横切って再び機体の太陽電池パネルを照らすと、SLIMはまた目を覚ましたのです。ただし、マルチバンドカメラが動作することはありませんでした。極端な温度の影響がとうとう出た、ということを示唆していました。
坂井は「結果として、実証したかったことはほぼ実証でき、特にピンポイント着陸性能については期待通りの性能でしたので、成功と言ってよいと思っています」と話します。
月面での昼夜という過酷な環境を何度も行き来したSLIMは強力な太陽フレアからダメージを受けた可能性も考えられ、6月末に、通信が再び確立される可能性は低いとの発表がされました。SLIMの月面上での運用はノミナルでの想定をはるかに超え、数か月に及びました。
次のステップ
クレータ「しおり」は、その名の通り本に挟まれる栞(しおり)を意味しています。クレータ近くを目標地点としたSLIMの着陸技術が、宇宙探査の歴史を刻む「栞」となるようにと願いを込めて名付けられました。
ピンポイント着陸の技術は、”探査機が正確に狙った場所に着陸できる”という宇宙探査における新時代を切り開いて行きます。国際的なアルテミス計画で人類が再び月を目指す中、精度の高い着陸が可能となれば潜在的資源の調査や将来の有人基地へ物資輸送も効率的に実現できるようになるでしょう。

また2機の小型プローブLEVの成功は、天体での広域探査における新たな可能性も示唆しています。
「たとえば、機体に着陸脚を付ける代わりにLEVのようなものを10機単位で載せて次々に天体表面に投げる、という新しいスタイルの探査も可能になったと思います。」澤井教授は構想します。
1月20日、午前3時。藤本副所長は、表情が硬いのはなぜか、という質問にこう答えていました。「皆、早く何が起きているかを知りたくてしょうがないのです。頭の中は『探査機がどういう状態になっているんだろう』ということが気になって仕方がない。それが見えたら、じゃあ次はどうしたら良いかを考えたい。我々は次をどうしたら良いかをいつも考えていたいタイプの人間なので、次が見えないということがしんどいのです。」
月面のSLIMから情報が届いた今こそ次の新たな挑戦が何であるのかが見え、ここまでに至った道を笑顔で振り返る時間も生まれました。
(文: Elizabeth Tasker/ 訳:磯辺真純)
関連リンク:
魔の20分?:SLIMが挑む、月面への高精度ピンポイント着陸
小型月着陸実証機 SLIMプロジェクトサイト | SLIM Xアカウント
小型月着陸実証機SLIM ピンポイント月着陸ライブ・記者会見(日本語) | SLIM landing live broadcast & press conference(英語)
 Previous Post
Previous Post Next Post
Next Post