魔の20分?:SLIMが挑む、月面への高精度ピンポイント着陸
「減速をはじめて着陸までの約20分間の運用は、息もできない痺れる様な、魔の20分になると思われます」これはSLIMプロジェクトチームの櫛木賢一サブマネージャの言葉です。
JAXAの小型月着陸実証機 「SLIM」は、8月下旬に種子島宇宙センターから打ち上げられることになっています。その名称からも分かるように、SLIMの目的地は月面です。月面への到達に成功している着陸機(ランダ)はこれまでにもありますが、着陸場所にここまでこだわっているランダは他にありません。

これまでの技術による惑星表面や月面への着陸は、地上からの軌道決定に依存しています。さらにランダの姿勢や天体表面からの距離を把握するためにランダに搭載された慣性航法装置(加速度計やレーダ)からの測定値と組み合わせて、ランダを制御し、着陸させています。この方法は着陸を成功させるのには十分ではあるものの、ランダが目的の場所に正確に着陸するのには限界があります。着陸精度としては数キロメートルから10数キロメートル となり、もしそこが荒れた地形や傾斜した場所であれば機体が転倒するリスクがあります。つまり、機体を危険にさらすような地形や物体の存在のない、広くて平坦な地形の場所に着陸するよう計画しなければなりません。
しかし、天体表面の地図がより詳細に得られるようになるにつれ、特定の領域に探査機を着陸させることのニーズが高まってきています。
「『かぐや』や米国の『ルナー・リコネサンス・オービター(LRO)』、インドの『チャンドラヤーン』といった月周回衛星によって、高分解能の月面観測データが数多く得られています。」櫛木サブマネージャは説明します。「そのため月科学探査や資源探査の関心は ”月面のどこか” から ”特定のクレータの隣のあの岩石!”と考えがシフトして来ています」

SLIMミッション開発の原動力となったのは、より高い精度で降りたい場所へ、そこがより危険であっても着陸できる能力の必要性でした。SLIMは、月の地球側にある「神酒の海(Mare Nectaris)」の西に位置するSHIOLIクレータ付近の傾斜地に正確にピンポイント着陸を行うための航法と、二段階式により安全なタッチダウンを行う技術を実証します。
SHIOLIは比較的新しく形成されたクレータであると考えられています。月周回衛星「かぐや」の観測データから、SHIOLIで見られる放出物には月深部のマントルに由来すると考えられるカンラン石が多く含まれることが示唆されています。こういった鉱物を詳しく調べれば、月の内部構造や月そのものの形成に関する情報を明らかにできるかもしれません。しかし、クレータ放出物が散らばる場所というのはクレータを囲む斜面であり、着陸するのが難しいことから通常は避けられてしまいます。従来の技術では調査したい物体にランダが十分に接近して着陸を行うのは困難をきわめ、たとえ接近できたとしても地形のせいで機体が転倒するリスクもありました。SLIMでは平均斜度6~7度の地形において誤差100m以内の着陸精度を実現し、こういった制約を打ち破ろうとしています。
小型月着陸実証機(SLIM)ミッション概要動画
SLIMのピンポイント着陸の精度の鍵を握っているのは、画像照合によって月面の上空で機体の正確な位置を把握し、自律誘導制御により着陸地点までナビゲートする、探査機の ”スマートな目” です。
「従来の着陸技術では、ランダが自身の位置を把握し制御する精度には限界があります。」櫛木サブマネージャは話します。
SLIMに搭載されるコンピュータには月周回衛星「かぐや」と「LRO」が記録したSLIM着陸地点周辺のクレータの地図が搭載されています。SLIMは上空にいる間に搭載されたカメラで月面の画像を撮影し、そこからクレータを検出して、クレータのくぼ地模様と搭載した地図のクレータ位置情報とを照合し、探査機の位置を精度よく知ることができるのです。
また、月の重力は絶えず探査機を引っ張り続けており、ほんの少しでも遅れるとSLIMは着陸地点を見失ってしまうか墜落してしまう可能性があるため、このプロセスにはきわめて高速な処理が求められます。そのため、画像照合のアルゴリズムは、撮像コマンドから結果出力までを5秒以内で行います。
SLIMが現在位置を正確に把握したら、搭載されたジャイロセンサを利用して加速度を測定し、「スタートラッカ」と「太陽センサ」といった光学センサによって探査機の姿勢を把握し、レーダで月面までの距離を測定します。こうしたセンサ類を駆使して探査機の位置や向きや速度を把握すれば、目標の着陸地点に向かってSLIM自身が自律的に軌道を修正することが出来ます。

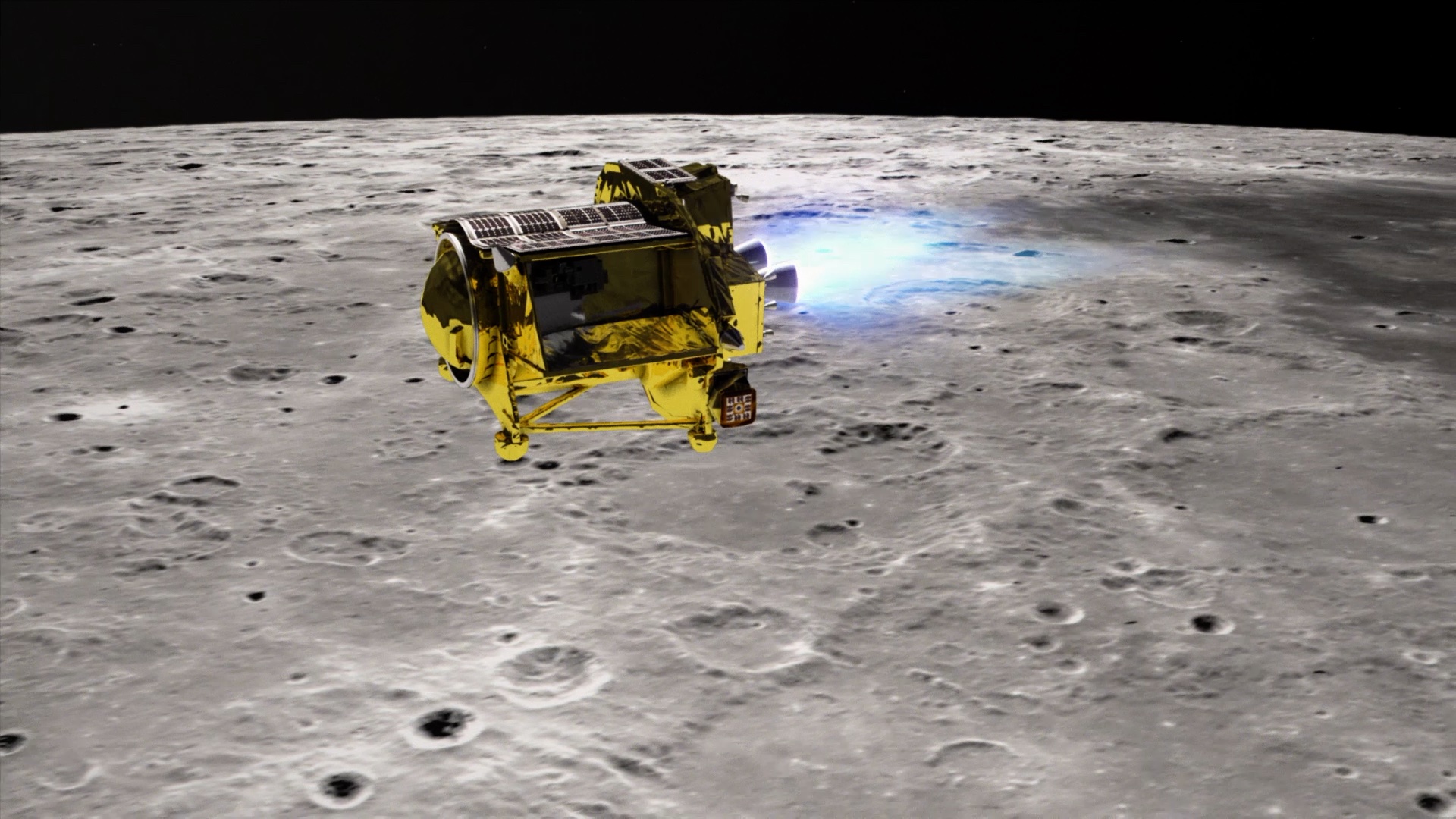
ただ、たとえ高精度で目標の着陸地点に到達しても、その後探査機が平坦な地を見つけるため移動しなければならないようであれば意味がありません。SLIMは「2段階着陸方式」と呼ばれる方法で、行きたい場所が傾斜地であっても、安全な着陸を実現します。
SLIMは着陸地点の上空50メートルになると、搭載レーダから、より正確な測定ができる光学式距離計「レーザレンジファインダ(LRF)」に切り替えて高度の測定を行います。着陸シーケンスの最終段階に近づくと探査機は垂直に姿勢変更して月面を撮像し、岩などの危険な障害物の有無に応じて水平位置の微調整を行います。着陸地点の3メートル上空まで来るとメインスラスタをカットオフし、補助スラスタにより機体の姿勢をコントロールします。
SLIMは、3Dプリンタで造形したアルミニウムの金属格子からなる5つの半円形をした脚を備えており、着陸時の運動エネルギーを自らがつぶれることで消費し、衝撃を抑えます。SLIMの上部には2つの前補助脚、機体中段に2つのデッキ脚があり、さらに下部に1つの主脚があります。SLIMが月面に垂直に姿勢変更して降下する際、最初に月面に触れるのはこの主脚です。第二段階で機体は前方に傾き、やがて前補助脚が接地すると月面で安定します。中段のデッキ脚は通常の着陸では月面に接地しませんが、何かあって機体が回転してしまった際などに横転を止める役割を持ちます。
櫛木サブマネージャはこのように説明します。「私たちの着陸目標地点は傾斜地であることから、この方式が最も転倒リスクが小さく、かつシンプルで軽量な着陸脚システムと言えます。」
着陸直前、SLIMは2つの小型プローブ「LEV」を放出します。この2つのプローブのミッションは着陸地点周辺の状況を記録することと、月面における自律機能の工学実証です。一方SLIM本体は月面に無事に着陸すると、クレータ放出物の組成を調べるため、分光カメラを用いて周辺を観測します。

🎮 SLIMを着陸させてみたくなった方は、 JAXA宇宙教育センターによるゲームスタイルの教材、”SLIM : THE PINPOINT MOON LANDING GAME” でSLIMを操縦してみよう!
「ピンポイント着陸」という言葉は、小惑星リュウグウに「はやぶさ2」がきわめて正確なタッチダウンを行った際にも使われた表現です。ですが櫛木サブマネージャは、月とリュウグウでの重力条件の違いにより、求められる技術も大きく異なると説明します。
「リュウグウの重力は地球の重力の約8万分の1と極めて小さいため、ゆっくりと着陸降下の運用ができます。いざとなればやり直しも可能ですし、事前のリハーサルなども出来ます。」櫛木サブマネージャは説明します。「一方で月となると、地球の約6分の1とはいえ大きな重力があるため、絶えず月に引っ張られている状態。絶えずエンジン噴射が必要ですし、着陸へのトライはやり直しのきかない一発勝負となります。」
着陸成功へはこのたった一度のチャンスしかないということもあり、櫛木サブマネージャはSLIMの最終降下シーケンスを「魔の20分」と表現しましたが、これはNASAがかつて火星探査車キュリオシティの火星着陸について「7 minutes of terror(直訳で “恐怖の7分間”)」と表現したことも思い起こさせます。
SLIMは高精度の月面着陸における初の実証機となることを期待されていますが、同時にSLIMチームは、この技術実証がさまざまな天体への探査計画にも革命をもたらし、後続のミッションに広く適用されていくことを願っています。
(文: Elizabeth Tasker/ 訳:磯辺真純)
関連リンク:
・X線分光撮像衛星(XRISM)および小型月着陸実証機(SLIM)を搭載したH-IIAロケット47号機の打上げの模様をライブ中継します!(番組開始予定:8月28日(月)午前8:55)
・SLIM ウェブサイト
・SLIM Twitter
・SLIM プロジェクト概要説明資料
・SLIM : THE PINPOINT MOON LANDING GAME(小学高学年~中学生向けのゲームスタイルの教材)
 Previous Post
Previous Post Next Post
Next Post