20 minutes of terror: SLIM will attempt a pinpoint accurate landing on the lunar surface
“The start of the deceleration to the landing on the Moon’s surface is expected to be a breathless, numbing 20 minutes of terror!” says Kushiki Kenji, Sub-Project Manager of the SLIM Mission.
In the next few days, the JAXA “Smart Lander for Investigating Moon” (SLIM) mission will launch from the Tanegashima Space Centre. As the mission name suggests, the destination of SLIM is the lunar surface. But while other lunar landers have successfully reached the Moon, none have been quite so particular about their landing location.

Conventional techniques for touching down on the surface of a planet or moon rely on a trajectory determined from the Earth. This is coupled with measurements from the spacecraft’s inertial navigation instruments that are used for controlling the lander, such as accelerometers and radar that assess the spacecraft’s attitude and distance from the surface. This is sufficient to make a successful landing, but there is a limit to how precisely the spacecraft can land next to a desired location. Landing accuracy is typically in the ballpark of a few to a few dozen kilometres, and rough or sloped terrain risks overturning the spacecraft. Missions must therefore plan to land in regions of wide flat terrain, free from any object or topology that would place the spacecraft in danger.
However, as we map the surface of celestial bodies in ever more detail, the need to land close to a very specific area has increased.
“Lunar orbiters such as Kaguya, the USA’s Lunar Reconnaissance Orbiter (LRO), and India’s Chandrayaan missions have provided large amounts of high-resolution observation data of the lunar surface,” explains Kushiki. “Therefore, interest in lunar science and resource exploration has shifted from ‘somewhere on the Moon’s surface’ to ‘that rock next to this specific crater!’”

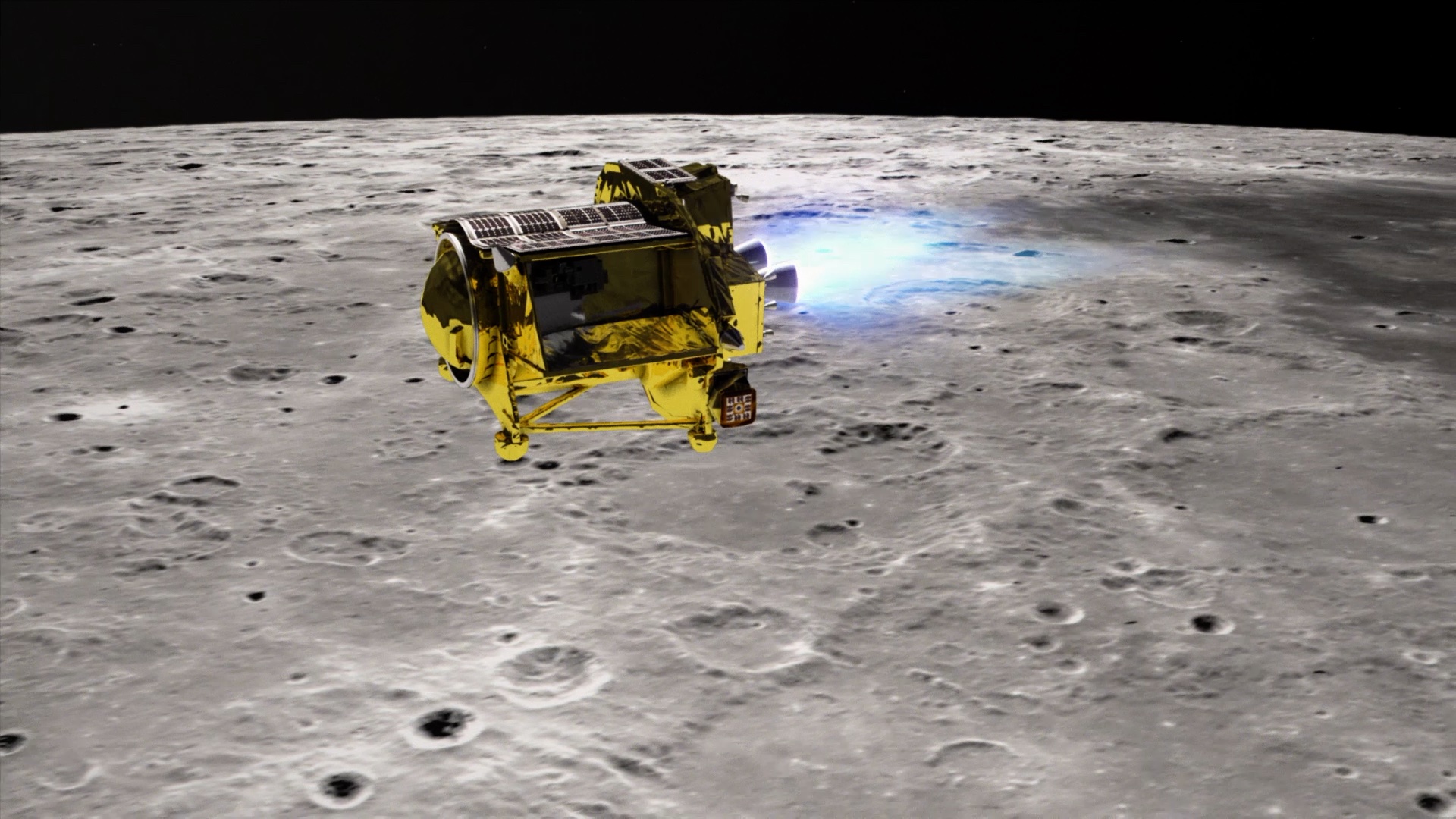
It is the need to be able to land with much greater accuracy and on potentially more hazardous terrain that drove the development of the SLIM mission. The small lander will demonstrate new technology for navigating to a precise pinpoint landing and performing a two-step stable touchdown on the sloped grounds near the Shioli crater, situated to the west of Mare Nectaris on the near side of the Moon.
Shioli is thought to be relatively recent impact crater. Observations from the JAXA lunar orbiter Kaguya suggest that ejecta from Shioli may contain olivine from the Moon’s mantle. A closer look at such minerals could reveal information about the Moon’s interior structure and formation. However, sites of crater ejecta are usually avoided due to the difficulty of landing within a small ejecta strewn area on the sloped sides surrounding a crater. Conventional landers struggle to guarantee a sufficiently close landing to the ejecta material for study, and risk overturning on the terrain if proximity is achieved. SLIM is attempting to break these restrictions, with a landing accuracy of within a 100m on terrain with an average slope of 6 – 7 degrees.
The SLIM mission movie.
The secret behind the pinpoint accuracy of the SLIM landing is the spacecraft’s “smart eyes”, which uses image matching to automatically ascertain the exact location of the spacecraft above the lunar surface, followed by autonomous guidance control to navigated to the landing site.
“With conventional landing techniques, there is a limit to the accuracy with which the lander can determine and control its own position,” says Kushiki.
SLIM’s onboard computer is equipped with maps of the craters recorded by the Kaguya and LRO orbiters surrounding the mission landing site. The spacecraft will snap images of the lunar surface with the onboard cameras as SLIM flies overhead, detect the craters in these images, and match the pock-marked pattern with that on the map to identify its exact location.
This automated process must be completed fast, as the Moon’s gravity is continually tugging on the spacecraft and even a short delay would cause SLIM to miss the landing site or crash. The image matching algorithm therefore completes within 5 seconds from photograph capture to result output.
From the accurately known position, SLIM can utilise its onboard gyro-sensors to measure acceleration, the optical star tracker and sun sensor to know the current attitude, and radar to measure the distance to the surface. This gives the spacecraft knowledge of its location, orientation and speed to high precision, which SLIM uses to autonomously corrects its trajectory to reach the target landing site.

Reaching a desired landing location with high accuracy is of limited use if the spacecraft is then forced to move to locate flat terrain. The ability to land safely on sloped ground is where SLIM’s two-step landing mechanism comes into play.
At 50m above the landing site, SLIM switches from the onboard radar to the more accurate optical range finder (LRF) to measure altitude. During this final drop, the spacecraft rotates to a vertical position and snaps more images of the ground to identify dangerous obstacles, such as boulders, before making last minor adjustments to its position. At 3m, the main engine is cut and the spacecraft attitude is controlled with the auxiliary thrusters.
SLIM is equipped with five semi-circular metal legs constructed from a 3D printed aluminium lattice, which squash on impact to safely absorb energy. Two legs sit under SLIM’s upper body, two sit at the rear and one leg extends towards the back. As SLIM descends vertically downwards, it is this back leg that first touches the lunar surface. In the second step, the spacecraft tips forwards, rocking onto the upper support legs before stabilising on the lunar surface. In a nominal case, the rear support legs do not touch the Moon, but can prevent SLIM from tumbling sideways in the case of a more tricky landing.
“As our landing target is on a slop, this is the simplest and lightest leg landing system which has the lowest risk of overturning,” explains Kushiki.
Just before landing, SLIM will release two small probes called the Lunar Excursion Vehicles (LEV). This pair will record the state of the landing site and perform an engineering demonstration of autonomous exploration across the surface. Once safely on lunar ground, SLIM will examine the area with a spectroscopic camera to explore the composition of the crater ejecta.

🎮 Want to try landing SLIM yourself? Play the “SLIM Pinpoint Moon Landing Game” developed by the JAXA Space Education Center!
The term “pinpoint landing” was also used to describe the very precise touchdown of the Hayabusa2 spacecraft on asteroid Ryugu. But Kushiki notes that the gravitational conditions on the Moon and Ryugu require very different landing technology.
“Ryugu has an extremely small gravity of about 1/80,000 that of the Earth, so the descent and landing operations can be performed slowly. You can rehearse in advance and re-do if necessary,” Kushiki describes. “But when it comes to the Moon, the spacecraft is constantly bring pulled towards the Moon by its stronger gravity, even though this is still only about 1/6 of the Earth. This requires continuous firing of engines, and landing is a one-shot game that cannot be undone.”
It is this single chance to make a successful landing that causes Kushiki to describe SLIM’s final descent as “20 minutes of terror”, echoing the “7 minutes of terror” described by NASA for landing the Curiosity rover on Mars.
SLIM hopes to be the first demonstration of a high-precision landing on the Moon, but the team hope the technology can be widely applied to missions in the future, changing forever the way we can plan visits to other worlds.
Further information:
SLIM and XRISM are scheduled to launch on the H-IIA Launch Vehicle No. 47 on August 28 at 9:26 am JST. Watch the launch live coverage (August 28 from 8:55 am),
SLIM Mission Website
SLIM Twitter Feed
SLIM Press Kit
The SLIM Pinpoint Moon Landing Game
Cosmos posts:
XRISM (launching with SLIM): As XRISM prepares to launch, what might the telescope reveal about the largest structures in our Universe?
Kaguya/SELENE: At the threshold of a lunar renaissance: the SELENE mission, 10 years later
 Previous Post
Previous Post Next Post
Next Post